近日,我校機械工程學院丁建寧教授、程廣貴教授、胡興好副教授等在《美國科學院院刊》(Proceedings of the National Academy of Sciences)上在線發(fā)表研究論文“Fast, variable stiffness-induced braided coiled artificial muscles”。江蘇大學為第一完成單位,胡興好副教授為第一作者,碩士生王翔宇和碩士生王健為共同第一作者,通訊作者為胡興好副教授、程廣貴教授、丁建寧教授和德克薩斯大學達拉斯分校雷伊·鮑曼院士。
近年來,開發(fā)同時具備響應速度快、絕對輸出功大的纖維人工肌肉對其在柔性可穿戴外骨骼等領域中的應用具有重要意義。加捻卷繞型人工肌肉具有媲美自然肌肉的性能而被廣泛研究。然而由于加捻纖維的捻度從表面到其中心逐漸遞減,處于中心部分的纖維對人工肌肉驅(qū)動性能的貢獻甚微,這意味著在纖維中心的輸入能量沒有得到有效利用。有研究通過鞘-芯結構、中空結構來解決響應速度和能量效率問題。然而,這種中空結構需要較厚的壁厚來避免扭轉(zhuǎn)引起的管塌陷,這增加了肌肉重量,減少了輸出功。
為解決上述科學問題,近日,江蘇大學胡興好副教授等提出編織包覆中空管構筑編織卷繞型人工肌肉的新方法,并提出了變剛度的驅(qū)動理論。具體原理為:在氣壓作用下,中空管帶動編織管直徑膨脹,肌肉剛度隨之增加,進而導致肌肉在拉伸負載下收縮,在壓縮負載下伸長。該肌肉可在低氣壓下實現(xiàn)快速、大沖程和高頻驅(qū)動。此外,由于其低成本、高性能和易于制造,編織卷繞型人工肌肉滿足了當前機器人驅(qū)動應用的需求。最后,團隊設計了三種機器人,包括爬行機器人、行走機器人和攀爬機器人,展示了其在智能機器人中的應用。爬行機器人可以達到22.5cm/s(2.25個身體長度/秒)的速度;行走機器人可以達到12.5cm/s的速度直線行走,也可以在14秒內(nèi)以0.1cm-1的曲率轉(zhuǎn)動方向,同時保持1.1cm/s的最大速度。
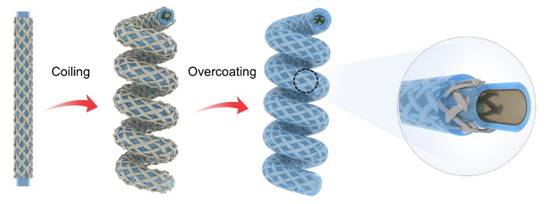
圖1.編織卷繞型人工肌肉的制作流程

圖2. 編織卷繞型人工肌肉的無泵驅(qū)動原理示意圖
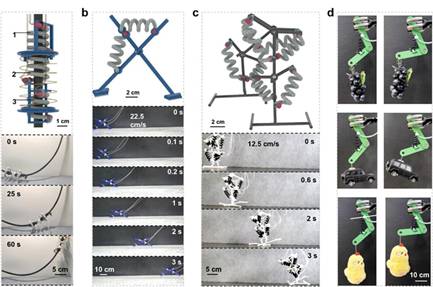
圖3 編織卷繞型人工肌肉在機器人上的應用
該項工作得到國家自然科學基金、中國博士后基金、中國科協(xié)青年人才托舉工程和江蘇省優(yōu)秀青年基金等項目的資助。(機械工程學院)
文章鏈接:https://www.pnas.org/doi/10.1073/pnas.2412288121



