受費曼工作(The Feynman Lectures on Physics)啟發(fā),,近日,,江蘇大學(xué)徐琳教授,、丁建寧教授與美國科羅拉多大學(xué)博爾德分校弗蘭克·韋爾內(nèi)瑞教授合作報告了一種基于液晶彈性體輻條的非對稱收縮來旋轉(zhuǎn)運動的費曼軟體機器人,,創(chuàng)新性地實現(xiàn)了無需控制電源周期性開關(guān)即可進(jìn)行持續(xù)自主運動的電驅(qū)動液晶彈性體軟體機器人,。該研究以“Programming motion into materials using electricity-driven liquid crystal elastomer actuators”為題發(fā)表在國際著名期刊《軟體機器人》(Soft Robotics)上,。江蘇大學(xué)機械工程學(xué)院為該論文的第一單位,,研究生朱陳和塞繆爾·拉蒙特為共同一作。
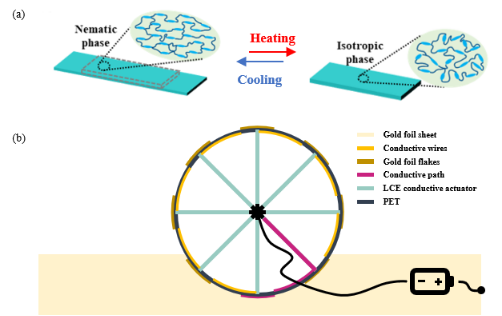
圖1. 液晶彈性體驅(qū)動機理與Feynman軟體機器人結(jié)構(gòu)
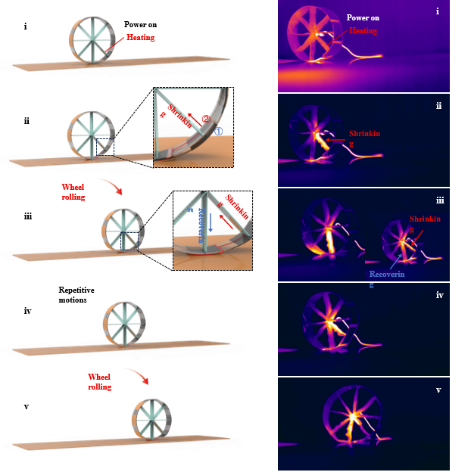
圖2. Feynman車輪軟體機器人持續(xù)運動機制

Feynman車輪軟體機器人運動展示
智能材料變形驅(qū)動是集材料,、力學(xué),、生物學(xué)等多學(xué)科的交叉前沿研究熱點。液晶彈性體(Liquid crystal elastomers,,LCEs) 作為能夠產(chǎn)生大的可逆驅(qū)動應(yīng)變的智能柔性彈性體材料,,通過設(shè)計含有各向異性剛性介晶單元的聚合物網(wǎng)絡(luò)結(jié)構(gòu),在外界刺激下(光,、熱,、電等) 使其達(dá)到相轉(zhuǎn)變溫度時,引發(fā)由液晶態(tài)(有序)向各向同性態(tài)(無序)轉(zhuǎn)變的鏈段運動,,進(jìn)而表現(xiàn)為宏觀結(jié)構(gòu)程序化變形,。液晶彈性體材料類似于自然界生物體在多種外界刺激下自我調(diào)節(jié)的特性,在開發(fā)智能仿生設(shè)備和構(gòu)建軟體機器人系統(tǒng)中擁有巨大的應(yīng)用前景,?;谝壕椥泽w輻條的非對稱收縮,可直接從穩(wěn)定的外部電源獲取能量以維持軟體機器人的連續(xù)旋轉(zhuǎn)運動,,這一設(shè)計理念有望啟發(fā)其他軟體機器人智能材料與智能結(jié)構(gòu)的多元集成,,代表著自主運動的軟體機器人設(shè)計向前邁進(jìn)了可喜的一步。
研究還闡述了基于LCE-LM電驅(qū)動器的一些其他有趣的應(yīng)用,。如圖3所示,,研究人員構(gòu)建了手掌可動(5 mm~ 55 mm)的雙向驅(qū)控的柔性夾持器,在 2 A 至 4 A 的低電流刺激下,,可以精確外夾或內(nèi)撐抓取如文件夾,、螺釘、燒杯和環(huán)形工件等異形物品,,解決了傳統(tǒng)外夾式單向驅(qū)動的液晶彈性體柔性夾持器受其驅(qū)動結(jié)構(gòu)的制約,,難以精確抓取異形環(huán)形等工件,應(yīng)用潛力受到限制的問題,。值得注意的是,,夾持器可保留97%水重量下夾持吸水海綿,在柔性異形敏感物品的抓取中展現(xiàn)出優(yōu)勢,。
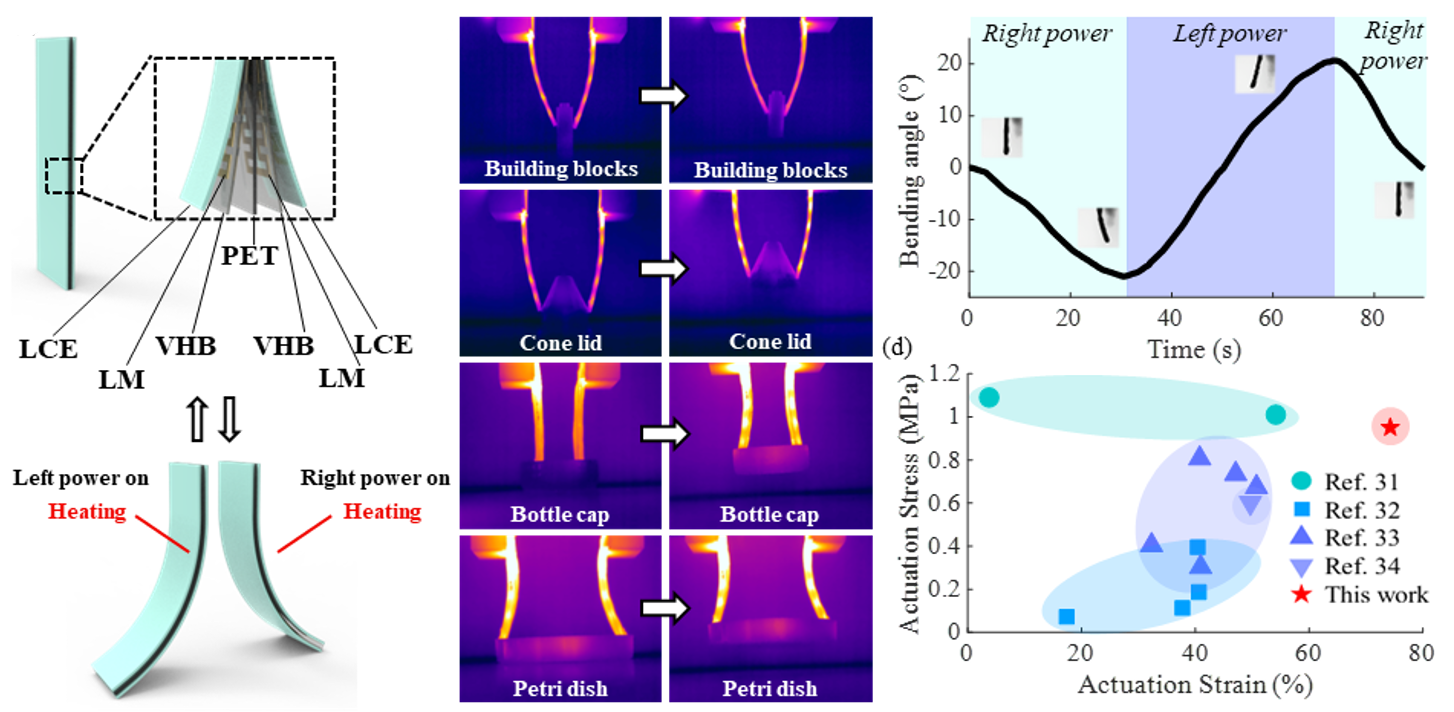
圖3. 用于柔性異形操縱的雙向驅(qū)控夾持器

用于柔性操縱的液晶彈性體夾持器
受控驅(qū)動的定向運動是開發(fā)能夠自主運動的軟體機器人的基礎(chǔ),。受果蠅幼蟲運動的啟發(fā),,研究提出了可通過連續(xù)的通電和斷電循環(huán)誘導(dǎo)其定向爬行的液晶彈性體軟體機器人,軟體機器人定向移動的原理基于足部不對稱設(shè)計造成的各向異性摩擦,,機器人柔性基底材料的表面粗糙度,、硬度和幾何形狀對摩擦特性的影響機制在團(tuán)隊2022年發(fā)表的工作中已有闡述。
研究還發(fā)現(xiàn),,軟體機器人的水平運動可以顯示為與前足與后足之間的法向力差成正比,,可以通過優(yōu)先考慮該法向力的巨大不平衡以優(yōu)化機器人的幾何設(shè)計。在此基礎(chǔ)上優(yōu)化的軟體機器人自重僅1.9 g,,通過獨立驅(qū)動左右“液晶彈性體肌肉”,,轉(zhuǎn)向機器人在低電流的驅(qū)動下可在平坦和傾斜的表面上實現(xiàn)轉(zhuǎn)彎半徑(70~150 mm)的精準(zhǔn)控制(圖4)。
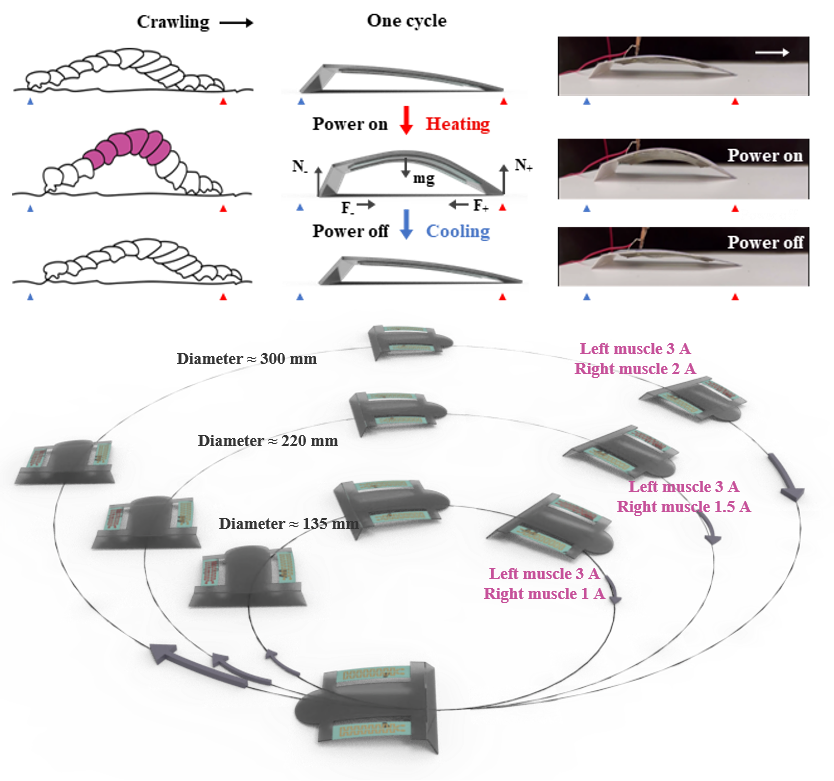
圖4. 仿生爬行軟體機器人
該工作得到了國家自然科學(xué)基金,、江蘇省自然科學(xué)基金和機械系統(tǒng)與振動全國重點實驗室開放基金等項目的支持,。(機械工程學(xué)院)
文章鏈接:https://doi.org/10.1089/soro.2023.0063



